فصل پنجم - شناسایی الگو
تبدیل دایره هاف
تبدیل دایرهٔ هاف بسیار شبیه به تبدیل خط هاف که در بخش قبل توضیح داده شد عمل میکند. در مورد کشف خط، یک خط با دو پارامتر $\left( r,\ \theta \right)$ تعریف میشود ولی برای تعریف دایره به سه پارامتر نیاز داریم:
$$C:\ (x_{\text{center}},\ y_{\text{center}},\ r)$$
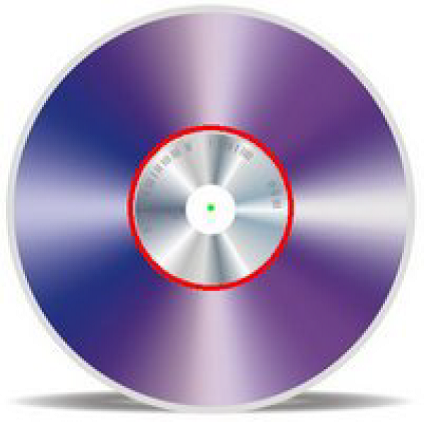
که $(x_{\text{center}},\ y_{\text{center}})$ مرکز دایره (نقطهٔ سبز رنگ در شکل زیر) و r هم شعاع آن را مشخص میکند. با این سه پارامتر میتوانیم هر دایرهای با هر مختصات و شعاعی تعریف کنیم. دایره قرمز در شکل زیر مثالی از کشف دایره است:
 |
|---|
| مثالی از کشف دایره |
به منظور رعایت بهینگی، اُ سی وی این تبدیل با استفاده از روش گرادیان هاف پیاده سازی کرده است که متفاوت با روش مورد استفاده در تبدیل استاندارد هاف است.
کد
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
using namespace cv;
/** @function main */
int main(int argc, char** argv)
{
Mat src, src_gray;
/// Read the image
src = imread( argv[1], 1 );
if( !src.data )
{ return -1; }
/// Convert it to gray
cvtColor( src, src_gray, CV_BGR2GRAY );
/// Reduce the noise so we avoid false circle detection
GaussianBlur( src_gray, src_gray, Size(9, 9), 2, 2 );
vector<Vec3f> circles;
/// Apply the Hough Transform to find the circles
HoughCircles( src_gray, circles, CV_HOUGH_GRADIENT, 1, src_gray.rows/8, 200, 100, 0, 0 );
/// Draw the circles detected
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
// circle center
circle( src, center, 3, Scalar(0,255,0), -1, 8, 0 );
// circle outline
circle( src, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
/// Show your results
namedWindow( "Hough Circle Transform Demo", CV_WINDOW_AUTOSIZE );
imshow( "Hough Circle Transform Demo", src );
waitKey(0);
return 0;
}
توضیح
در خط 23 به منظور کاهش نویز و جلوگیری از کشف دایرههای اشتباه، یک فیلتر گوسی اعمال میکنیم.
در خط 28 با استفاده از تابع HoughCircles تبدیل دایره هاف را اعمال میکنیم. این تابع دارای 9 آرگومان به شرح زیر است:
- src_gray: تصویر ورودی که باید سیاه و سفید باشد.
- circles: یک بردار که مجموعهای از سه مقدار $x_{c},y_{c},\ r$ را برای هر دایره کشف شده نگه می دارد.
- CV_HOUGH_GRADIENT: روش کشف را مشخص میکند. در حال حاضر فقط همین روش در اُ سی وی وجود دارد.
- 1: نسبت معکوس وضوح است.
- src_gray.rows/8: حدقل فاصلهٔ بین دایرههای کشف شده است.
- 200: آستانهٔ بالایی برای لبهیاب کَنی که در این تابع استفاده میشود.
- 100: آستانهای برای کشف مرکز دایره است.
- 0: حداقل شعاع مجاز برای دایرههای کشف شده است. اگر معلوم نیست، مقدارش را صفر بگذارید.
- 0: حداکثر شعاع مجاز برای دایرههای کشف شده است. اگر معلوم نیست، مقدارش را صفر بگذارید.
خروجی
 |
|---|
| خروجی برنامه |